Featured Research
 |
|
 |
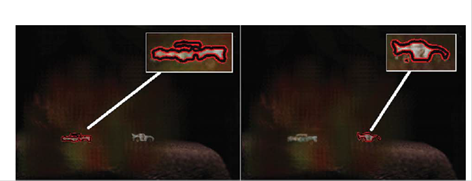
The 3D object visualized by the viewer with removed obscurations using an augmented reality device. |
 |
Typical augmented reality device in the experiments |
| For more details, see Adam Markman, Xin Shen, Hong Hua, and Bahram Javidi, “Augmented reality three-dimensional object visualization and recognition with axially distributed sensing,” Optics Letters 41, issue 2, pp 297-300 (January 2016) | |
3D Human Gesture and Activity Recognition |
|
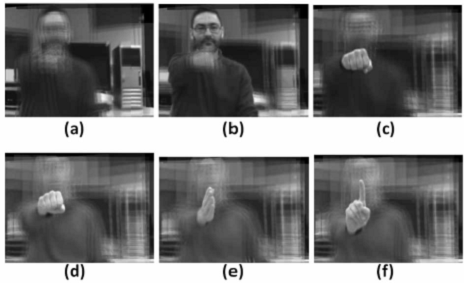 |
3-D Gesture Recognition Experiments
Images show the reconstruction capability of the system, for the same frame, and for a specific person and gesture:
For details, see:
|
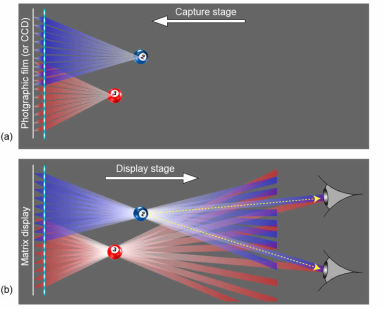
3D Displays |
|
 |
|
 |
|
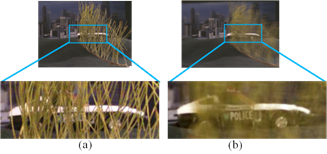
3D Object Tracking from behind Obscurations |
|
 |
|
 |
3. Segmented and tracked objects from behind occlusion
|
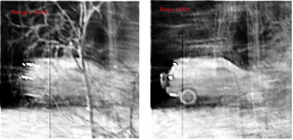
Long Range 3D Imaging for Defense and Security Applications |
|
|
|
a. Tests conducted from the US Air Force Sensors Directorate tower and camera railb. Results of the obscuration penetration experiment
Source: Daniel LeMaster, Barry Karch, and Bahram Javidi, “Mid-Wave Infrared 3D Integral Imaging at Long Range,” IEEE Journal of Display Technology, vol. 9, pp. 545-551 (1 July 2013) |
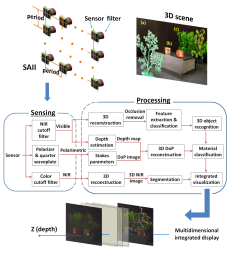
Multidimensional Optical Sensing and Imaging System (MOSIS) |
|
 |
|
 |
|
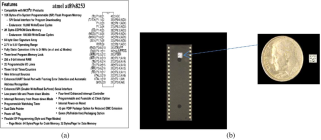
Hardware Security and Authentication of Integrated Circuits using Micro/Nano Optical ID Tags |
|
 |
|
 |
|
Bio Photonics, 3D Microscopy, and Automated Disease Identification |
|
|
|
Schematics of an experimental setup to measure the complex amplitude of red blood cells (RBCs) to capture opto-biological signatures |
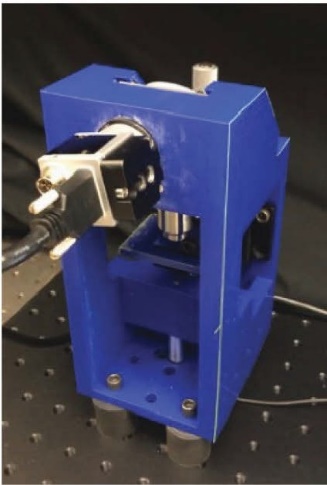
(a) Optical configuration and (b) 3D-printed experimental system with dimensions of 94 mm x 107 mm x 190.5 mm used in RBC data collection. |
|
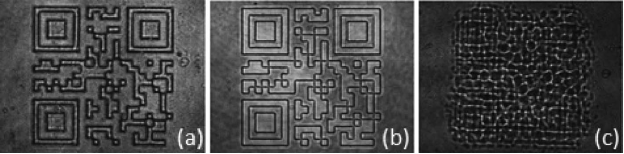
Security, Anti-Counterfeiting, and Authentication using Nano Technologies |
|
 |
|
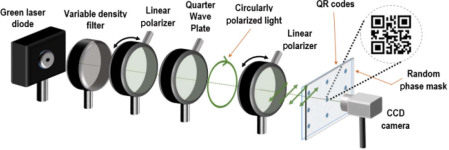 |
Optical setup for authentication of codes produced with gold nanoparticles |
 |
|
|
|
|
 |
|